
ΛΕΙΤΟΥΡΓΙΑ
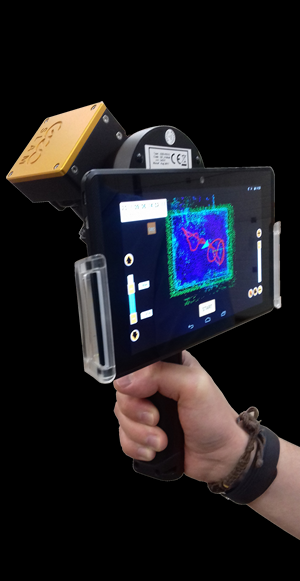
Τα laser scanner της GeoSLAM σε αντίθεση με τα terrestrial laser scanner, δεν χρειάζεται να είναι ακίνητα κατά τη διάρκεια της σάρωσης, αλλά κρατώντας τα στο χέρι μπορούμε να περπατήσουμε μέσα στο χώρο και να μετρήσουμε ακόμα και τα πιο απόκρυφα σημεία.

GeoSLAM ZEB-REVO
Χαρακτηριστικά
Διαστάσεις (κεφαλής laser) 86 x 113 x 287 mm
-
Ταχύτητα συλλογής δεδομένων
43.200 σημεία/sec
-
Ακρίβεια 3D μέτρησης
1-3 cm
-
Μέγιστη εμβέλεια
Έως 30m (15-20m σε εξωτερικούς χώρους)

-
Κλάση Laser
Class 1 (ασφαλές για τα μάτια)
-
Γωνιακό οπτικό πεδίο
+270 x 360°
-
Βάρος (κεφαλής laser)
1 kgr
GeoSLAM ZEB-REVO RT
Χαρακτηριστικά
Διαστάσεις (κεφαλής laser) 60 x 60 x 360 mm
-
Γραφικό περιβάλλον
Συμβατό με οποιοδήποτε smart-phone, tablet ή laptop
-
Εμβέλεια WiFi
15m
-
Χωρητικότητα αποθήκευσης δεδομένων
120GB
-
Format δεδομένων
las, E57, ply κ.α.
-
Διάρκεια μπαταρίας
1.5 ώρες
-
Ακρίβεια 3D μέτρησης
1-3cm
GeoSLAM ZEB-HORIZON
Χαρακτηριστικά
Διαστάσεις (κεφαλής laser): 100x240 mm
-
Ταχύτητα συλλογής δεδομένων
300.000 σημεία/sec
-
Ακρίβεια 3D μέτρησης
1-3 cm
-
Μέγιστη εμβέλεια
Έως 100 m

-
Κλάση Laser
Class 1 (ασφαλές για τα μάτια)
-
Διάρκεια μπαταρίας
3.5 ώρες
-
Βάρος (κεφαλής laser)
1.3 kgr
ΠΩΣ ΔΟΥΛΕΥΕΙ

Κρατήστε GeoSLAM ZEB-REVO, το ελαφρύ περιστρεφόμενο laser-scanner και κινηθείτε μέσα στην περιοχή που θέλετε να σκανάρετε για να αποθηκεύσετε περισσότερα από 40.000 σημεία/δευτερόλεπτο.

Χρησιμοποιήστε το GeoSLAM Ηub Softtware για να γίνει αυτόματα το cloud–to–cloud registration.

Δημιουργήστε κατόψεις, τομές, υπολογίστε όγκους κλπ.

ΛΟΓΙΣΜΙΚΟ
Όλα τα δεδομένα των μετρήσεων GeoSLAM μπορούν να επεξεργαστούν στο λογισμικό GeoSLAM Hub, όπου ο κορυφαίος αλγόριθμος SLAM (Simultaneous Localisation and Mapping) κάνει τα μαγικά του. Συνδυάζοντας τα δεδομένα των μετρήσεων από το laser με τα δεδομένα θέσης από το ενσωματωμένο IMU, ο αλγόριθμος SLAM χρησιμοποιεί ρουτίνες αναγνώρισης χαρακτηριστικών για να εκτελέσει αυτόματα το cloud–to–cloud registration.